
利用精准的速度+索引映射方法,让机器人精确复现医生的超声扫查轨迹。采用变力连续映射技术,实时控制机械臂末端的扫查力度,确保连续准确的扫查力度复现,最终实现超声医生扫查手法的完美复现。同时,采用了基于网络随机时延预测的双边临场感遥操作技术,解决了网络延时产生的影响,保障遥操作系统的稳定性和透明性。


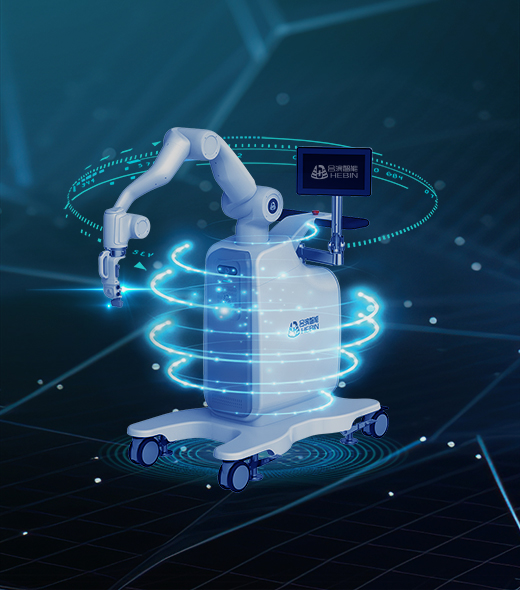
采用轻型、高灵活的7自由度冗余机械臂。在引入冗余自由度后,可有效避免关节限位、机械臂奇异,同时提升机械臂的避障性能。通过自主研发的冗余机械臂控制算法,可大大提高扫查时机械臂的灵活性和可操作性,实现包括心脏,颈部,甲状腺,肾脏等部位的高难度扫查姿态。

提出超声扫查全流程机械臂柔顺控制方法。在非扫查阶段,机械臂采用阻抗控制;在扫查阶段,采用阻抗与恒力的混合控制。既能保证垂直方向恒定的扫查接触力,又能保证其他方向的柔顺性。使用了高准确度的碰撞检测算法,可实现全臂杆高精度外力估计与定位,构建了涵盖该算法在内的三重安全保证措施,确保人机交互的安全性与稳定性。搭载人体姿态感知和肢体运动预测技术,可感知人体体态运动以及体表微小变化。